内存分段
2023-1-20|2023-1-20
DieInADream
type
status
date
slug
summary
tags
category
icon
password
Property
Jan 20, 2023 02:33 PM
威斯康辛州大学操作系统书籍《Operating Systems: Three Easy Pieces》读书笔记系列之 Virtualization(虚拟化)。本篇为虚拟化技术的基础篇系列第三篇(Memory Virtualization),内存虚拟化。内存虚拟化又将分为两篇,本篇为第二篇内存虚拟化之基础 - 内存分段和空闲空间管理
Segmentation
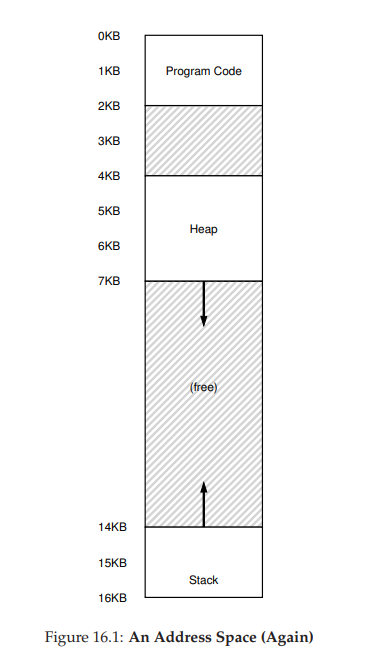
- 如果我们将整个地址空间放入物理内存,那么栈和堆之间的空间并没有被进程使用,却依然占用了实际的物理内存。因此,简单的通过基址寄存器和界限寄存器实现的虚拟内存很浪费。另外,如果剩余物理内存无法提供连续区域来放置完整的地址空间,进程便无法运行。这种基址加界限的方式看来并不像我们期望的那样灵活。
- CRUX:怎样支持大地址空间?
Segmentation: Generalized Base/Bounds
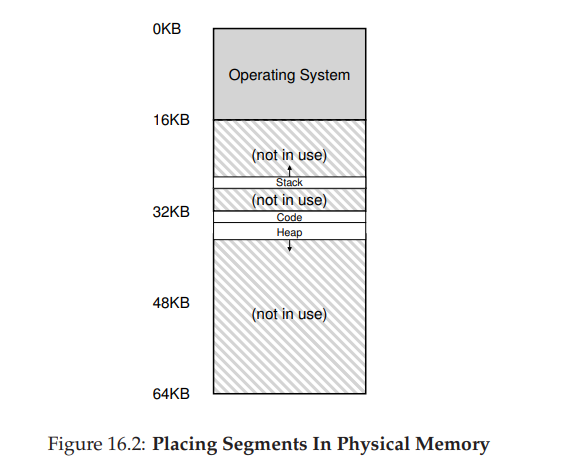
- 在 MMU 中引入不止一个基址和界限寄存器对,而是给地址空间内的每个逻辑段(segment)一对。一个段只是地址空间里的一个连续定长的区域,在典型的地址空间里有 3 个逻辑不同的段:代码、栈和堆。分段的机制使得操作系统能够将不同的段放到不同的物理内存区域,从而避免了虚拟地址空间中的未使用部分占用物理内存。
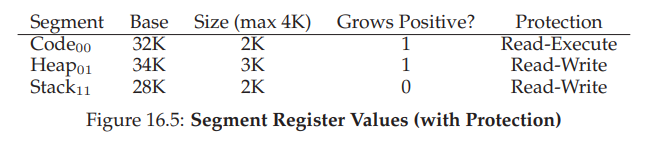
- 如图所示,64KB 的物理内存除去操作系统占用的 16KB 内存外可以划分成三个段,给每个段都分配一对基址和界限寄存器。
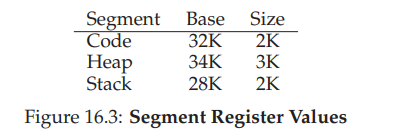
- 下表记录了上图例中的寄存器值,每个界限寄存器记录了一个段的大小。
- 地址转换举例:
- 假设现在要引用虚拟地址 100(在代码段中),MMU 将基址值加上偏移量(100)得到实际的物理地址:100 + 32KB = 32868。然后它会检查该地址是否在界限内(100 小于 2KB),发现是的,于是发起对物理地址 32868 的引用。
- 一个堆中的地址,虚拟地址 4200。(参考图16.1) 如果用虚拟地址 4200 加上堆的基址(34KB),得到物理地址 39016,这不是正确的地址。我们首先应该先减去地址空间中堆的偏移量,即该地址指的是这个段中的哪个字节。因为堆从虚拟地址 4K(4096)开始,4200 的偏移量实际上是 4200 减去 4096,即 104,然后用这个偏移量(104)加上基址寄存器中的物理地址(34KB),得到真正的物理地址 34920。
- 如果我们试图访问非法的地址,例如 7KB,超出了堆的边界呢。硬件会发现该地址越界,因此陷入操作系统,很可能导致终止出错进程。从而产生段异常(segmentation violation)或段错误(segmentation fault)。
Which Segment Are We Referring To?
- 硬件在地址转换时使用段寄存器。它如何知道段内的偏移量,以及地址引用了哪个段?
Explicit
- 一种常见的方式,有时称为显式(explicit)方式,就是用虚拟地址的开头几位来标识不同的段,VAX/VMS 系统使用了这种技术。上述例子中有三个段,相应的需要两位就可以表示了。如果我们用 14 位虚拟地址的前两位来标识,那么前两位即为对应的段号,后12位则为偏移量。上述的 4200 (堆段+104)就标识为 01 0000 0110 1000
- 00 代码段 01 堆段 11 栈段(因为起始地址为 00 0000 0000 0000,地址空间如图所示 0-2KB 为代码段,二进制表示前四位为 0000-0010,4KB 为堆的起始地址,二进制表示前四位为 0100)
- 偏移量简化了对段边界的判断。我们只要检查偏移量是否小于界限,大于界限的为非法地址。因此,如果基址和界限放在数组中(每个段一项),为了获得需要的物理地址,硬件会做下面这样的事:在上述 14 位虚拟地址的例子中,对应 SEG_MASK 即为 0x3000,SEG_SHIFT 为 12,OFFSET_MASK 为 0xFFF。
- 由于用了两位来表示段号,但其实是可以表述四个段的,浪费了一个表示,所以有些系统会将堆和栈放在一个段中,因此就只需要一位来表示。
Implict
- 隐式(implicit)方式中,硬件通过地址产生的方式来确定段。
- 例如,如果地址由程序计数器产生(即它是指令获取),那么地址在代码段。如果基于栈或基址指针,它一定在栈段。其他地址则在堆段。
What About The Stack?
- 上述例子中未涉及到栈的地址转换。在表 16.3 中,栈被重定位到物理地址 28KB。但有一点关键区别,它 反向增长。物理内存中,它始于 28KB,增长回到 26KB,相应虚拟地址从 16KB 到 14KB。因此地址转换方式和其他段会有所不同。
- 所以对于段的硬件支持除了基地址寄存器和界限寄存器以外,还需要知道段地址的增长方向,可以用一位来表示。更新后的寄存器结果如下:1 表示正向增长(从小到大),0 表示反向增长。
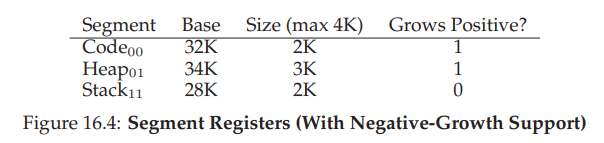
- 假设要访问虚拟地址 15KB,根据图 16.1 知道这是个栈地址,以及根据物理内存的对应关系不难发现物理地址为 27KB。虚拟地址的二进制形式为 11 1100 0000 0000,前两位表示为 stack 段,偏移量为 3KB,但此时非正确偏移,只是二进制地址表示中的地址偏移。为了得到正确的反向偏移,我们必须从 3KB 中减去最大的段地址:在这个例子中,段可以是 4KB,因此正确的偏移量是 3KB 减去 4KB,即−1KB。只要用这个反向偏移量(−1KB)加上基址(28KB),就得到了正确的物理地址 27KB。用户可以进行界限检查,确保反向偏移量的绝对值小于段的大小。
Support for Sharing
- 随着分段机制的不断改进,系统设计人员很快意识到,通过再多一点的硬件支持,就能实现新的效率提升。具体来说,要节省内存,有时候在地址空间之间共享(share)某些内存段是有用的。尤其是,代码共享很常见,今天的系统仍然在使用。
- 为了支持共享,需要一些额外的硬件支持,这就是保护位(protection bit)。基本为每个段增加了几个位,标识程序是否能够读写该段,或执行其中的代码。通过将代码段标记为只读,同样的代码可以被多个进程共享,而不用担心破坏隔离。虽然每个进程都认为自己独占这块内存,但操作系统秘密地共享了内存,进程不能修改这些内存,所以假象得以保持。
- 如下表所示。代码段的权限是可读和可执行,因此物理内存中的一个段可以映射到多个虚拟地址空间。有了保护位,前面描述的硬件算法也必须改变。除了检查虚拟地址是否越界,硬件还需要检查特定访问是否允许。如果用户进程试图写入只读段,或从非执行段执行指令,硬件会触发异常,让操作系统来处理出错进程。
Fine-grained vs. Coarse-grained Segmentation
- 到目前为止,我们的例子大多针对只有很少的几个段的系统(即代码、栈、堆)。我们可以认为这种分段是粗粒度的(coarse-grained),因为它将地址空间分成较大的、粗粒度的块。但是,一些早期系统更灵活,允许将地址空间划分为大量较小的段,这被称为细粒度(fine-grained)分段。
- 支持许多段需要进一步的硬件支持,并在内存中保存某种段表(segment table)。这种段表通常支持创建非常多的段,因此系统使用段的方式,可以比之前讨论的方式更灵活。例如,像 Burroughs B5000 这样的早期机器可以支持成千上万的段,有了操作系统和硬件的支持,编译器可以将代码段和数据段划分为许多不同的部分。当时的考虑是,通过更细粒度的段,操作系统可以更好地了解哪些段在使用哪些没有,从而可以更高效地利用内存。
OS Support
- 系统运行时,地址空间中的不同段被重定位到物理内存中。与我们之前介绍的整个地址空间只有一个基址/界限寄存器对的方式相比,大量节省了物理内存。具体来说,栈和堆之间没有使用的区域就不需要再分配物理内存,让我们能将更多地址空间放进物理内存。
- 分段也带来了一些新的问题:
- 操作系统在上下文切换时应该做什么?各个段寄存器中的内容必须保存和恢复。显然,每个进程都有自己独立的虚拟地址空间,操作系统必须在进程运行前,确保这些寄存器被正确地赋值。
- 管理物理内存的空闲空间。新的地址空间被创建时,操作系统需要在物理内存中为它的段找到空间。之前,我们假设所有的地址空间大小相同,物理内存可以被认为是一些槽块,进程可以放进去。现在,每个进程都有一些段,每个段的大小也可能不同。一般会遇到的问题是,物理内存很快充满了许多空闲空间的小洞,因而很难分配给新的段,或扩大已有的段。这种问题被称为外部碎片
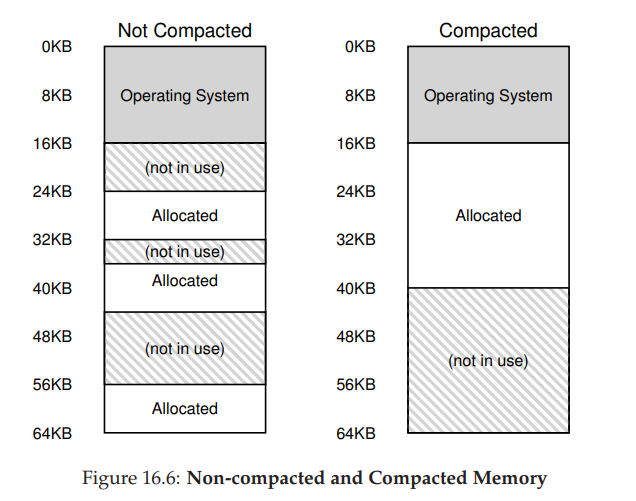
- 在这个例子中,一个进程需要分配一个 20KB 的段。当前有 24KB 空闲,但并不连续(是3 个不相邻的块)。因此,操作系统无法满足这个 20KB 的请求。该问题的一种解决方案是紧凑(compact)物理内存,重新安排原有的段。例如,操作系统先终止运行的进程,将它们的数据复制到连续的内存区域中去,改变它们的段寄存器中的值,指向新的物理地址,从而得到了足够大的连续空闲空间。这样做,操作系统能让新的内存分配请求成功。但是,内存紧凑 Compact 成本很高,因为拷贝段是内存密集型的,一般会占用大量的处理器时间。
- 一种更简单的做法是利用空闲列表管理算法,试图保留大的内存块用于分配。相关的算法可能有成百上千种,包括传统的最优匹配(best-fit,从空闲链表中找最接近需要分配空间的空闲块返回)、最坏匹配(worst-fit)、首次匹配(first-fit)以及像伙伴算法(buddy algorithm)这样更复杂的算法。
- 无论算法多么精妙,都无法完全消除外部碎片,因此,好的算法只是试图减小它。
Summary
- 分段解决了一些问题,帮助我们实现了更高效的虚拟内存。不只是动态重定位,通过避免地址空间的逻辑段之间的大量潜在的内存浪费,分段能更好地支持稀疏地址空间。它还很快,因为分段要求的算法很容易,很适合硬件完成,地址转换的开销极小。分段还有一个附加的好处:代码共享。如果代码放在独立的段中,这样的段就可能被多个运行的程序共享。
- 但我们已经知道,在内存中分配不同大小的段会导致一些问题,我们希望克服。首先,是我们上面讨论的外部碎片。由于段的大小不同,空闲内存被割裂成各种奇怪的大小,因此满足内存分配请求可能会很难。用户可以尝试采用聪明的算法,或定期紧凑内存,但问题很根本,难以避免。
- 第二个问题也许更重要,分段还是不足以支持更一般化的稀疏地址空间。例如,如果有一个很大但是稀疏的堆,都在一个逻辑段中,整个堆仍然必须完整地加载到内存中。换言之,如果使用地址空间的方式不能很好地匹配底层分段的设计目标,分段就不能很好地工作。因此我们需要找到新的解决方案。
Free-Space Management
- 如果要管理的空闲空间由大小不同的单元构成,管理就变得困难(而且有趣)。这种情况出现在用户级的内存分配库(如
malloc()和free()),或者操作系统用分段(segmentation)的方式实现虚拟内存。在这两种情况下,出现了外部碎片(external fragmentation)的问题:空闲空间被分割成不同大小的小块,成为碎片,后续的请求可能失败,因为没有一块足够大的连续空闲空间,即使这时总的空闲空间超出了请求的大小。
- CRUX:要满足变长的分配请求,应该如何管理空闲空间?什么策略可以让碎片最小化?不同方法的时间和空间开销如何?
Assumptions
- 假定基本的接口就像 malloc() 和 free()提供的那样。具体来说,void * malloc(size tsize)需要一个参数 size,它是应用程序请求的字节数。函数返回一个指针(没有具体的类型,在 C 语言的术语中是 void 类型),指向这样大小(或较大一点)的一块空间。对应的函数 void free(void *ptr) 函数接受一个指针,释放对应的内存块。请注意该接口的隐含意义,在释放空间时,用户不需告知库这块空间的大小。因此,在只传入一个指针的情况下,库必须能够弄清楚这块内存的大小。
- 进一步假设,我们主要关心的是外部碎片(external fragmentation),如上所述。当然,分配程序也可能有内部碎片(internal fragmentation)的问题。如果分配程序给出的内存块超出请求的大小,在这种块中超出请求的空间(因此而未使用)就被认为是内部碎片(因为浪费发生在已分配单元的内部),这是另一种形式的空间浪费。但是,简单起见,这里主要讨论外部碎片。
- 还假设,内存一旦被分配给客户,就不可以被重定位到其他位置。例如,一个程序调用 malloc(),并获得一个指向堆中一块空间的指针,这块区域就“属于”这个程序了,库不再能够移动,直到程序调用相应的 free() 函数将它归还。因此,不可能进行压缩(compaction)空闲空间的操作,从而减少碎片。但是,操作系统层在实现分段(segmentation)时,却可以通过压缩来减少碎片。
- 最后我们假设,分配程序所管理的是连续的一块字节区域。在一些情况下,分配程序可以要求这块区域增长。例如,一个用户级的内存分配库在空间快用完时,可以向内核申请增加堆空间(通过 sbrk 这样的系统调用),但是,简单起见,我们假设这块区域在整个生命周期内大小固定。
Low-level Mechanisms
Splitting and Coalescing
- 空闲列表包含一组元素,记录了堆中的哪些空间还没有分配。假设有下面的 30 字节的堆:

- 这个堆对应的空闲列表会有两个元素,一个描述第一个 10 字节的空闲区域(字节0~9),一个描述另一个空闲区域(字节 20~29):
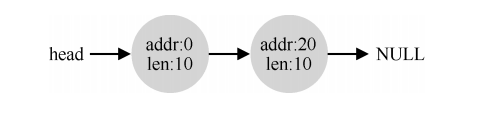
- 任何大于 10 字节的分配请求都会失败(返回 NULL),因为没有足够的连续可用空间。而恰好 10 字节的需求可以由两个空闲块中的任何一个满足。但是,如果申请小于 10 字节空间,分配程序会执行所谓的 分割(splitting)动作:它找到一块可以满足请求的空闲空间,将其分割,第一块返回给用户,第二块留在空闲列表中。
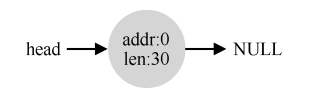
- 假设分配 1 字节,分配程序选择使用第二块空闲空间,对 malloc()的调用会返回 20(1 字节分配区域的地址),空闲列表会变成这样:

- 许多分配程序中因此也有一种机制,名为合并(coalescing)。还是看前面的例子(10字节的空闲空间,10 字节的已分配空间,和另外 10 字节的空闲空间)。
- 对于这个(小)堆,如果应用程序调用 free(10),归还堆中间的空间,会发生什么?如果只是简单地将这块空闲空间加入空闲列表,不多想想,可能得到如下的结果:

- 问题出现了:尽管整个堆现在完全空闲,但它似乎被分割成了 3 个 10 字节的区域。这时,如果用户请求 20 字节的空间,简单遍历空闲列表会找不到这样的空闲块,因此返回失败。
- 为了避免这个问题,分配程序会在释放一块内存时合并可用空间。想法很简单:在归还一块空闲内存时,仔细查看要归还的内存块的地址以及邻它的空闲空间块。如果新归还的空间与一个原有空闲块相邻(或两个,就像这个例子),就将它们合并为一个较大的空闲块。通过合并,最后空闲列表应该像这样:
Tracking The Size Of Allocated Regions
- free(void *ptr) 接口没有块大小的参数。因此它是假定,对于给定的指针,内存分配库可以很快确定要释放空间的大小,从而将它放回空闲列表。
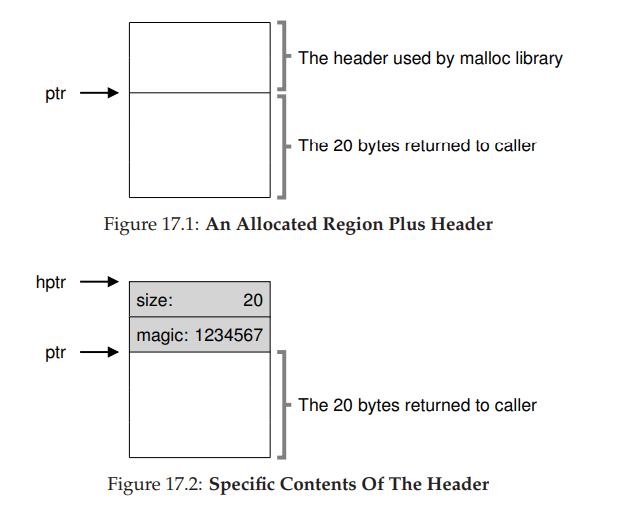
- 要完成这个任务,大多数分配程序都会在头块(header)中保存一点额外的信息,它在内存中,通常就在返回的内存块之前。如下图所示的例子中,检查一个 20 字节的已分配块,由 ptr 指着,设想用户调用了 malloc(),并将结果保存在 ptr 中:ptr = malloc(20)。
- 该 head 块中至少包含所分配空间的大小(这个例子中是 20)。它也可能包含一些额外的指针来加速空间释放,包含一个幻数来提供完整性检查,以及其他信息。我们假定,一个简单的 head 块包含了分配空间的大小和一个幻数:
- 用户调用 free(ptr)时,库会通过简单的指针运算得到头块的位置:
- 获得 head 块的指针后,库可以很容易地确定幻数是否符合预期的值,作为正常性检查(assert(hptr->magic == 1234567)),并简单计算要释放的空间大小即 head 块的大小加区域长度)。实际释放的是 head 块大小加上分配给用户的空间的大小。因此,如果用户请求 N 字节的内存,库不是寻找大小为 N 的空闲块,而是寻找 N 加上 head 块大小的空闲块。
Embedding A Free List
- 这个简单的空闲列表还只是一个概念上的存在,它就是一个列表,描述了堆中的空闲内存块。但如何在空闲内存自己内部建立这样一个列表呢?
- 假设我们需要管理一个 4096 字节的内存块(即堆是 4KB)。为了将它作为一个空闲空间列表来管理,首先要初始化这个列表。开始,列表中只有一个条目,记录了大小为 4096 的空间(减去 head 块的大小)。下面是该列表中一个节点描述:
- 现在来看一些代码,它们初始化堆,并将空闲列表的第一个元素放在该空间中。假设堆构建在某块空闲空间上,这块空间通过系统调用 mmap() 获得。这不是构建这种堆的唯一选择,但在这个例子中很合适。下面是代码:
- 执行这段代码之后,列表的状态是它只有一个条目,记录大小为 4088。head 指针指向这块区域的起始地址,假设是 16KB(尽管任何虚拟地址都可以)。现在,假设有一个 100 字节的内存请求。为了满足这个请求,库首先要找到一个足够大小的块。因为只有一个 4088 字节的块,所以选中这个块。然后,这个块被分割(split)为两块:一块足够满足请求(以及头块,如前所述),一块是剩余的空闲块。假设记录 head 块为 8 个字节(一个整数记录大小,一个整数记录幻数),堆中的空间如图所示。
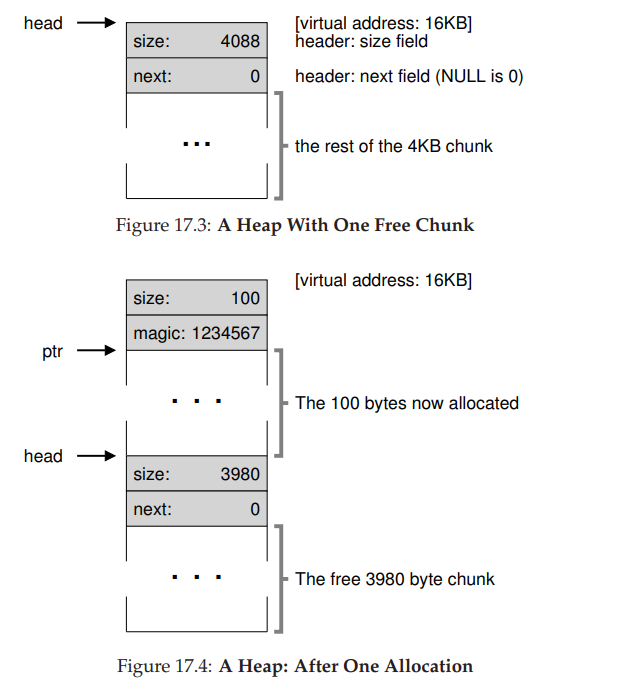
- 对于 100 字节的请求,库从原有的一个空闲块中分配了 108 字节,返回指向它的一个指针(在上图中用 ptr 表示),并在其之前连续的 8 字节中记录头块信息,供未来的 free() 函数使用。同时将列表中的空闲节点缩小为 3980 字节(4088−108)。
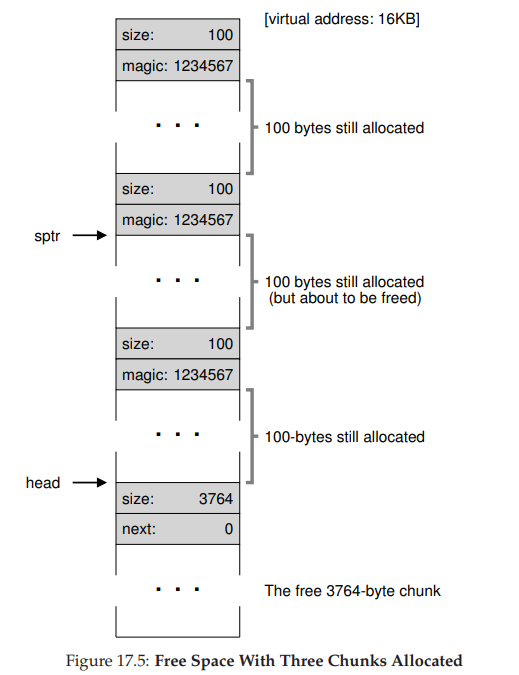
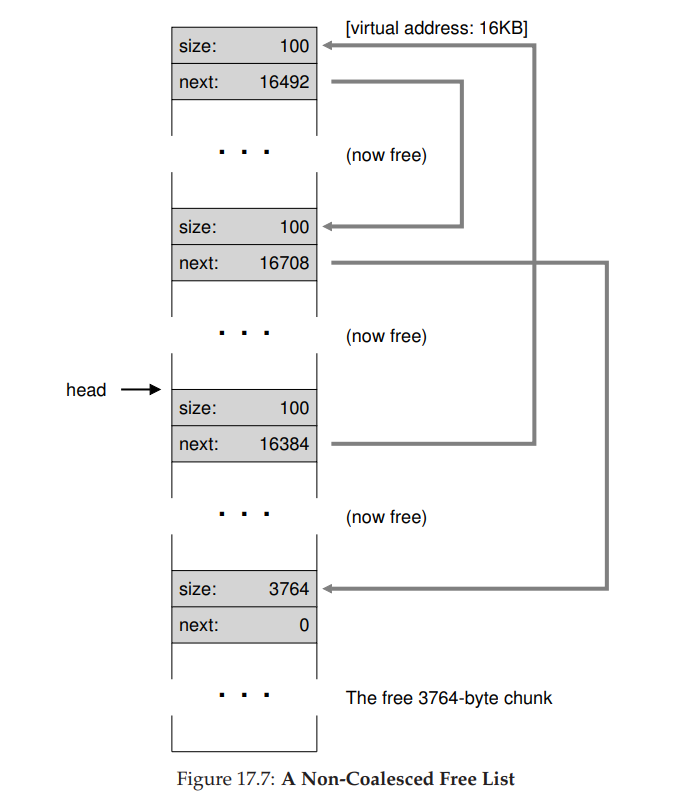
- 现在再来看该堆,其中有 3 个已分配区域,每个 100(加上头块是 108)。这个堆如图所示。可以看出,堆的前 324 字节已经分配,因此我们看到该空间中有 3 个头块,以及 3 个 100 字节的用户使用空间。空闲列表只有一个节点(由 head 指向),但在 3 次分割后,现在大小只有 3764 字节。
- 但如果用户程序通过 free() 归还一些内存,在这个例子中,应用程序调用 free(16500),归还了中间的一块已分配空间(内存块的起始地址 16384 加上前一块的 108,和这一块的头块的 8 字节,就得到了 16500)。这个值在前图中用 sptr 指向。库马上弄清楚了这块要释放空间的大小,并将空闲块加回空闲列表。假设我们将它插入到空闲列表的头位置,该空间如图所示。
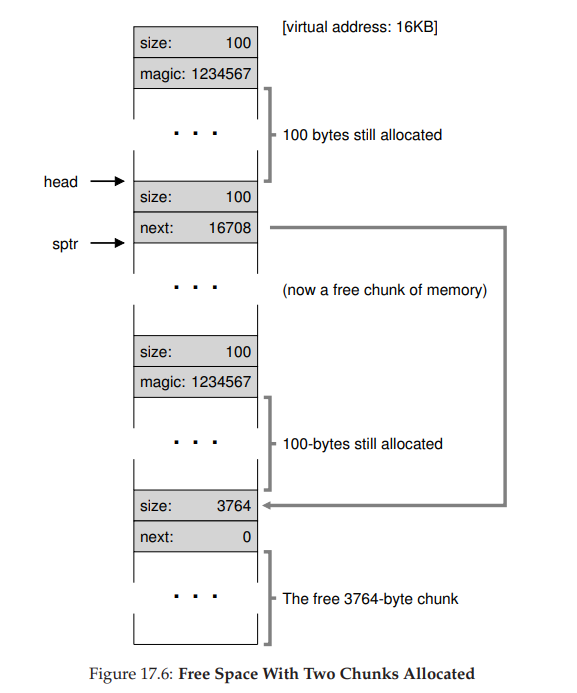
- 现在的空闲列表包括一个小空闲块(100 字节,由列表的头指向)和一个大空闲块(3764字节)。
- 现在假设剩余的两块已分配的空间也被释放。没有合并,空闲列表将非常破碎,如图 17.7 所示。我们忘了合并(coalesce)列表项,虽然整个内存空间是空闲的,但却被分成了小段,因此形成了碎片化的内存空间。解决方案很简单:遍历列表,合并(merge)相邻块。完成之后,堆又成了一个整体。
Growing The Heap
- 如果堆中的内存空间耗尽,应该怎么办?最简单的方式就是返回失败。在某些情况下这也是唯一的选择,因此返回 NULL 也是一种体面的方式。
- 大多数传统的分配程序会从很小的堆开始,当空间耗尽时,再向操作系统申请更大的空间。通常,这意味着它们进行了某种系统调用(例如,大多数 UNIX 系统中的 sbrk),让堆增长。操作系统在执行 sbrk 系统调用时,会找到空闲的物理内存页,将它们映射到请求进程的地址空间中去,并返回新的堆的末尾地址。这时,就有了更大的堆,请求就可以成功满足。
Basic Strategies
- 理想的分配程序可以同时保证快速和碎片最小化。遗憾的是,由于分配及释放的请求序列是任意的(毕竟,它们由用户程序决定),任何特定的策略在某组不匹配的输入下都会变得非常差。所以我们不会描述“最好”的策略,而是介绍一些基本的选择,并讨论它们的优缺点。
Best Fit
- 最优匹配(best fit)策略非常简单:首先遍历整个空闲列表,找到和请求大小一样或更大的空闲块,然后返回这组候选者中最小的一块。这就是所谓的最优匹配(也可以称为最小匹配)。只需要遍历一次空闲列表,就足以找到正确的块并返回。
- 最优匹配背后的想法很简单:选择最接它用户请求大小的块,从而尽量避免空间浪费。然而,这有代价。简单的实现在遍历查找正确的空闲块时,要付出较高的性能代价。
Worst Fit
- 最差匹配(worst fit)方法与最优匹配相反,它尝试找最大的空闲块,分割并满足用户需求后,将剩余的块(很大)加入空闲列表。
- 最差匹配尝试在空闲列表中保留较大的块,而不是向最优匹配那样可能剩下很多难以利用的小块。但是,最差匹配同样需要遍历整个空闲列表。更糟糕的是,大多数研究表明它的表现非常差,导致过量的碎片,同时还有很高的开销。
First Fit
- 首次匹配(first fit)策略就是找到第一个足够大的块,将请求的空间返回给用户。同样,剩余的空闲空间留给后续请求。
- 首次匹配有速度优势(不需要遍历所有空闲块),但有时会让空闲列表开头的部分有很多小块。因此,分配程序如何管理空闲列表的顺序就变得很重要。
- 一种方式是基于地址排序(address-based ordering)。通过保持空闲块按内存地址有序,合并操作会很容易,从而减少了内存碎片。
Next Fit
- 不同于首次匹配每次都从列表的开始查找,下次匹配(next fit)算法多维护一个指针,指向上一次查找结束的位置。其想法是将对空闲空间的查找操作扩散到整个列表中去,避免对列表开头频繁的分割。
- 这种策略的性能与首次匹配很接近,同样避免了遍历查找。
Examples
- 设想一个空闲列表包含 3 个元素,长度依次为 10、30、20(我们暂时忽略头块和其他细节,只关注策略的操作方式):
- 假设有一个 15 字节的内存请求。最优匹配会遍历整个空闲列表,发现 20 字节是最优匹配,因为它是满足请求的最小空闲块。结果空闲列表变为:本例中发生的情况,在最优匹配中常常发生,现在留下了一个小空闲块。

- 最差匹配类似,但会选择最大的空闲块进行分割,在本例中是 30。结果空闲列表变为:在这个例子中,首次匹配会和最差匹配一样,也发现满足请求的第一个空闲块。不同的是查找开销,最优匹配和最差匹配都需要遍历整个列表,而首次匹配只找到第一个满足需求的块即可,因此减少了查找开销。

Other Approaches
Segregated Lists
- 一直以来有一种很有趣的方式叫作分离空闲列表(segregated list)。基本想法很简单:如果某个应用程序经常申请一种(或几种)大小的内存空间,那就用一个独立的列表,只管理这样大小的对象。其他大小的请求都一给更通用的内存分配程序。
- 这种方法的好处显而易见。通过拿出一部分内存专门满足某种大小的请求,碎片就不再是问题了。而且,由于没有复杂的列表查找过程,这种特定大小的内存分配和释放都很快。
- 但也引入了新的复杂性。例如,应该拿出多少内存来专门为某种大小的请求服务,而将剩余的用来满足一般请求?超级工程师 Jeff Bonwick 为 Solaris 系统内核设计的厚块分配程序(slab allocator),很优雅地处理了这个问题
- 具体来说,在内核启动时,它为可能频繁请求的内核对象创建一些对象缓存(object cache),如锁和文件系统 inode 等。这些的对象缓存每个分离了特定大小的空闲列表,因此能够很快地响应内存请求和释放。
- 如果某个缓存中的空闲空间快耗尽时,它就向通用内存分配程序申请一些内存 slab(总量是页大小和对象大小的公倍数)。
- 相反,如果给定 slab 中对象的引用计数变为 0,通用的内存分配程序可以从专门的分配程序中回收这些空间,这通常发生在虚拟内存系统需要更多的空间的时候。
- slab 分配程序比大多数分离空闲列表做得更多,它将列表中的空闲对象保持在预初始化的状态。Bonwick 指出,数据结构的初始化和销毁的开销很大。通过将空闲对象保持在初始化状态,slab 分配程序避免了频繁的初始化和销毁,从而显著降低了开销。
Buddy Allocation
- 因为合并对分配程序很关键,所以人们设计了一些方法,让合并变得简单,一个好例子就是二分伙伴分配程序(binary buddy allocator)
- 在这种系统中,空闲空间首先从概念上被看成大小为 2^N 的大空间。当有一个内存分配请求时,空闲空间被递归地一分为二,直到刚好可以满足请求的大小(再一分为二就无法满足)。这时,请求的块被返回给用户。
- 在下面的例子中,一个 64KB 大小的空闲空间被切分,以便提供 7KB 的块:
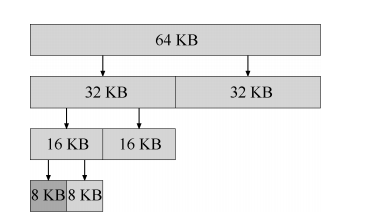
- 在这个例子中,最左边的 8KB 块被分配给用户(如上图中深灰色部分所示)。请注意,这种分配策略只允许分配 2 的整数次幂大小的空闲块,因此会有内部碎片(internal fragment)的麻烦。
- 伙伴系统的漂亮之处在于块被释放时。如果将这个 8KB 的块归还给空闲列表,分配程序会检查“伙伴”8KB 是否空闲。如果是,就合二为一,变成 16KB 的块。然后会检查这个 16KB 块的伙伴是否空闲,如果是,就合并这两块。这个递归合并过程继续上溯,直到合并整个内存区域,或者某一个块的伙伴还没有被释放。
- 伙伴系统运转良好的原因,在于很容易确定某个块的伙伴。怎么找?仔细想想上面例子中的各个块的地址。如果你想得够仔细,就会发现每对互为伙伴的块只有一位不同,正是这一位决定了它们在整个伙伴树中的层次。(2n 和 2n+1,2n 对应的二进制表示最低位肯定为 0,2n+1 该位即为 1)
Other Ideas
- 上面提到的众多方法都有一个重要的问题,缺乏可扩展性(scaling)。具体来说,就是查找列表可能很慢。因此,更先进的分配程序采用更复杂的数据结构来优化这个开销,牺牲简单性来换取性能。例子包括平衡二叉树、伸展树和偏序树。
- 考虑到现代操作系统通常会有多核,同时会运行多线程的程序(本书之后关于并发的章节将会详细介绍),因此人们这了许多工作,提升分配程序在多核系统上的表现。这只是人们为了优化内存分配程序,在长时间内提出的几千种想法中的两种。感兴趣的话可以深入阅读。或者阅读 glibc 分配程序的工作原理,你会更了解现实的情形。
Summary
- 在本章中,我们讨论了最基本的内存分配程序形式。这样的分配程序存在于所有地方,与你编写的每个 C 程序链接,也和管理其自身数据结构的内存的底层操作系统链接。与许多系统一样,在构建这样一个系统时需要这许多折中。对分配程序提供的确切工作负载了解得越多,就越能调整它以更好地处理这种工作负载。在现代计算机系统中,构建一个适用于各种工作负载、快速、空间高效、可扩展的分配程序仍然是一个持续的挑战。
- Utterance
